Farberkennung
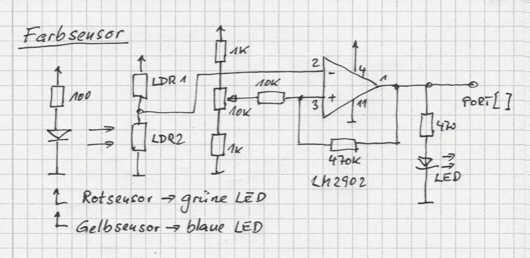
Der Roboter muss erkennen, wenn er auf eine gelbe oder auf eine rote Fläche kommt. Die Farberkennung beruht auf dem Prinzip, dass eine Leuchtdiode die Fläche mit der Farbe beleuchtet, die von der zu erkennenden Fläche absorbiert wird. Eine Brückenschaltung aus zwei lichtempfindlichen Widerständen und ein Komparator werten die Helligkeitsänderung aus und senden ein Digitalsignal an den Mikrocontroller. Die Ansprechschwelle kann über ein Potentiometer eingestellt werden.