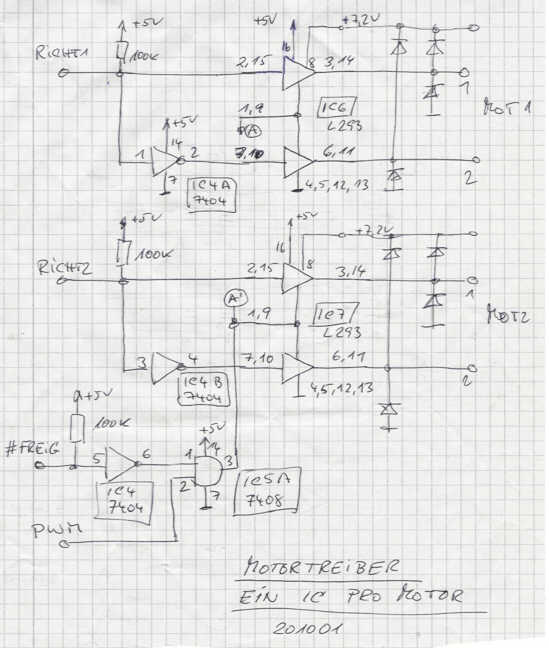
Umschaltlogik und Motortreiber
Das Richtungssignal Richt1=Rechts geht direkt an den Motortreiber Pin2 und 15; das invertierte Signal IC4-A Pin2 geht an Motortreiber Pin7 und 10. Der Motor läuft dadurch vorwärts (pin2=High pin7=Low) ODER rückwärts (pin 2=low und pin7= High). Motor 2 wird durch einen separates Treiber-IC angesteuert, damit sich die Verlustleistung (Wärme) besser aufteilt. Die Richtungssignale liegen über 100K an +5V, damit ein definierter Zustand besteht ,z.B. wenn kein Stecker aufgesteckt ist. Die Motoren sind nur angesteuert, wenn die Freigabesignale an L293( IC6) auf High sind. Dies ist der Fall, wenn beide Eingänge von IC5-a (Pin1 und 2) auf High sind (UND-Funktion !). Das Signal "#freig" ist standardmäßig auf high durch den 100k Widerstand nach +5V. Dies ist deshalb erforderlich, da der Ausgangsport des Mikroprozessors bei Reset- also die Zeit zwischen Spannungszuschalten und Start des Programms- auf high ist. Die Motoren können nur zusammen laufen; es gibt dadurch folgende Möglichkeiten:a) beide Motoren vorwärts --> Roboter fährt vorwärts
b) beide Motoren rückwärts --> Roboter fährt rückwärts
c) linker Motor vorwärts und rechter Motor rückwärts --> Roboter dreht rechts herum
d) linker Motor rückwärts und rechter Motor vorwärts--> Roboter dreht links herum
e) #freig=High --> Stopp